使用双目相机拍摄人脸图像,然后用OpenCV自带的人脸识别工具识别出人脸的特征点,利用双目视觉成像原理确定特征点在物理空间的三维坐标,精度能达到亚毫米级。
双目视觉成像原理
单个相机成像
这个部分网上资料很多,在此仅作简单介绍。
为了描述物理世界的一个点到相机图像中的转换关系,需要建立下图所示的四个坐标系:世界坐标系(Ow-XwYwZw)、相机坐标系(Oc-XcYcZc)、图像坐标系(o-xy)、像素坐标系(uv)。
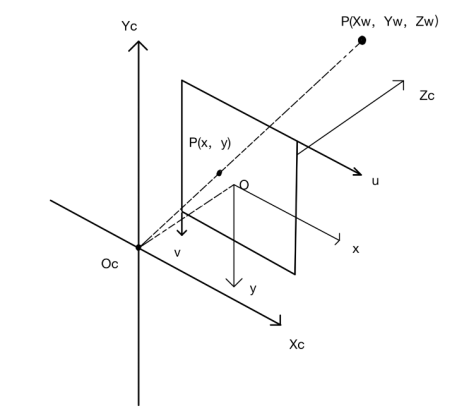
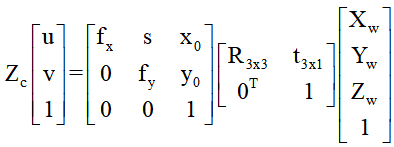
图中物理世界的点P最终要显示在相机图片中,用像素坐标系表示,因此需要建立世界坐标系到像素坐标系的转换关系。如下图公式所示。我们的目的是输入u、v,输出Xw、Yw、Zw ,因此解决其他未知参数即可解方程。公式中包含相机的内参和外参,其中内参有焦距(fx、fy),主点坐标(x0、y0),坐标轴倾斜参数s(理想情况下为0),外参即旋转矩阵R3x3、t3x1。
相机的内参和外参可以通过相机标定来解决。常见的标定方法有OpenCV自带的标定函数和Matlab标定工具两种,根据个人经验,Matlab标定方便卫生起效快,很容易获得误差极小的标定结果,具体操作网上也很容易搜到,不再赘述。
双目相机坐标计算
通过双目视觉计算三维坐标主要有两种方法,一种是光轴会聚模型(又叫三角测量,《Multiple View Geometry in Computer Vision》中有详细介绍),依赖于上文提到的转换关系,另一种是光轴平行模型。根据个人的应用场景,光轴平行模型精度略差,再加上这种方法大部分应用于立体匹配,因此本文不多叙述。
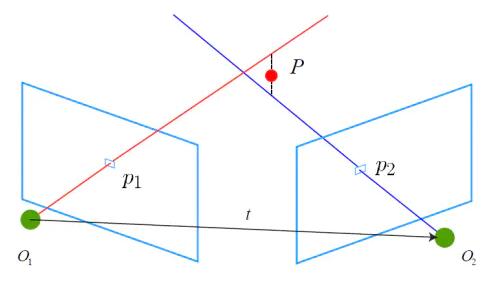
在光轴会聚模型中,物理世界的点P到两个相机分别都具有上述转换关系,每个相机对应一个方程,联立两个方程,用最小二乘法即可求得三维坐标。为什么要用最小二乘法,而不是求一个精确的值?那是因为像下图这样,由于一些不可消除的误差存在,例如相机畸变,图像噪声等,使得映射的两条射线不相交,也就没有交点P存在。因此只能使用最小二乘法计算出一个误差最小的点P坐标。
OpenCV中集成了这个方法:
1 | cv::triangulatePoints(T1, T2, pts_1, pts_2, pts_4d); |
- T1,T2是两个相机标定后的外参(平移矩阵R和旋转矩阵T)拼接而成的两个3x4矩阵,在上面的公式中也有体现,长下面这样:
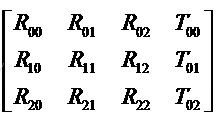
注意:
1.T1应该是个3x4的零矩阵,因为相机1的外参代表从相机1转换到相机1自身,不需要平移和旋转。
2. 输入的参数pts_1和pts_2应该是相机坐标系下的点,如果刚开始获得的点是像素坐标系下的话(u,v)需要转换到相机坐标系。
1 | cv::Mat T1 = (cv::Mat_<double>(3, 4) << //这是我项目里的实际参数 |
- pts_1,pts_2是输入的两幅图像中点P的像素坐标,pts_4d是输出的齐次坐标,简单处理一下就能变成3维坐标(前三项分别除以第四项,变成Xw,Yw,Zw)。把输入和输出的点扩展成多个点也能照常使用。
人脸特征点检测
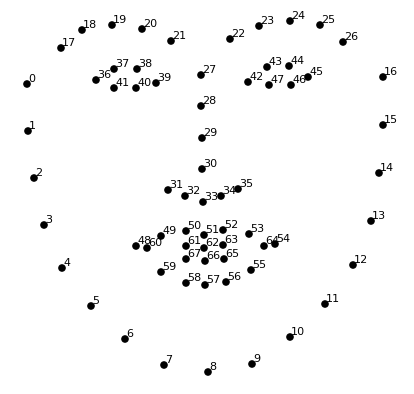
人脸特征点(facial landmarks),也可以叫人脸关键点,是人脸面部比较显著的一系列位置。目前常见的人脸特征点检测方法,会选择面部最为显著的68个特征点作为检测对象。在本文中,使用双目相机拍摄人脸图像,并做人脸特征点检测,左右两幅图像中均检测到对应的特征点之后,就能利用双目视觉计算人脸特征点的三维坐标,进而确定人脸的位置,应用到头动跟踪和点云配准里面。
OpenCV里面集成的人脸特征点检测方法是出自《Face Alignment at 3000 FPS via Regressing Local Binary Features》这篇论文,顾名思义速度非常快,也能同时检测出一幅图中多个人脸,缺点是错误率比较高,会把一些不是人脸的地方也检测为人脸,但也可以经过简单的修改提高表现。
首先需要导入OpenCV的一些头文件:
1 |
然后加载训练好的模型和人脸特征分类器:
1 | cv::CascadeClassifier faceDetector; |
接下来就需要读入图像并识别图像中的人脸了,注意拍摄到的图像是有畸变的,需要利用相机的标定结果(内参矩阵和畸变参数)来消去畸变:
1 | //相机内参矩阵 |
声明存放人脸的变量,注意这里用了vector是因为OpenCV的人脸识别方法会检测出图像中所有的人脸,不一定只有一个,然后将检测到的人脸存到faces1和faces2中
1 | std::vector<cv::Rect> faces1;//存放人脸 |
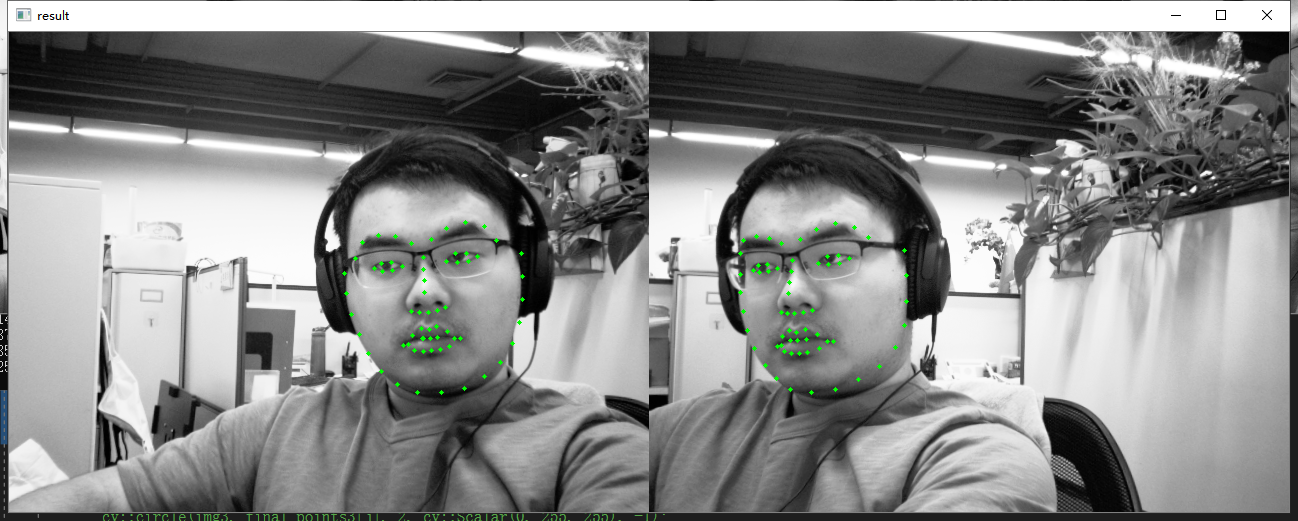
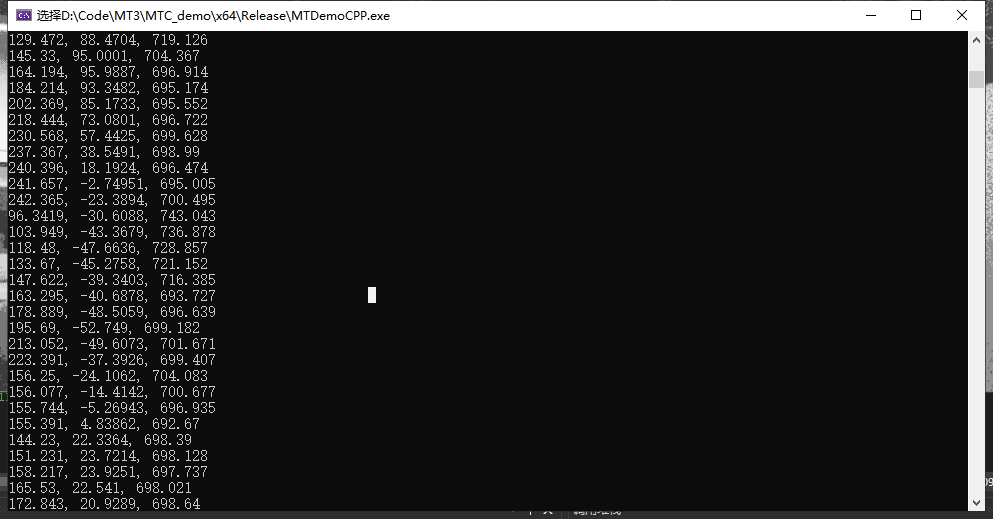
检测出特征点后就可以显示在图像上,并且计算关键点的三维坐标了(使用第一部分提到的cv::triangulatePoints函数):
1 | if (success1 && success2) |
结果如下:
如果想求某些特定的点的话,只需按照上面图片中给出的特征点序号,选择landmarks1和landmarks2里面特定的点即可。
到此,基于双目立体视觉的人脸特征点三维坐标测量也就完成了。如果你也照着大概实现了一遍,你会发现存在一些问题:
- OpenCV的人脸识别会经常把图片中不是人脸的地方当做人脸= =
- 识别出来的特征点会明显抖动,不稳定
针对这些问题,当然存在着解决方案,敬请期待后续博文更新。